Near Surface Characterization by Seismic Surface Wave Inversion
International Journal of Signal Processing and Analysis
(ISSN: 2631-5114)
Volume 6, Issue 1
Original Article
DOI: 10.35840/2631-5114/3508

Article Formats
Near Surface Characterization by Seismic Surface Wave Inversion
Table of Content
Figures
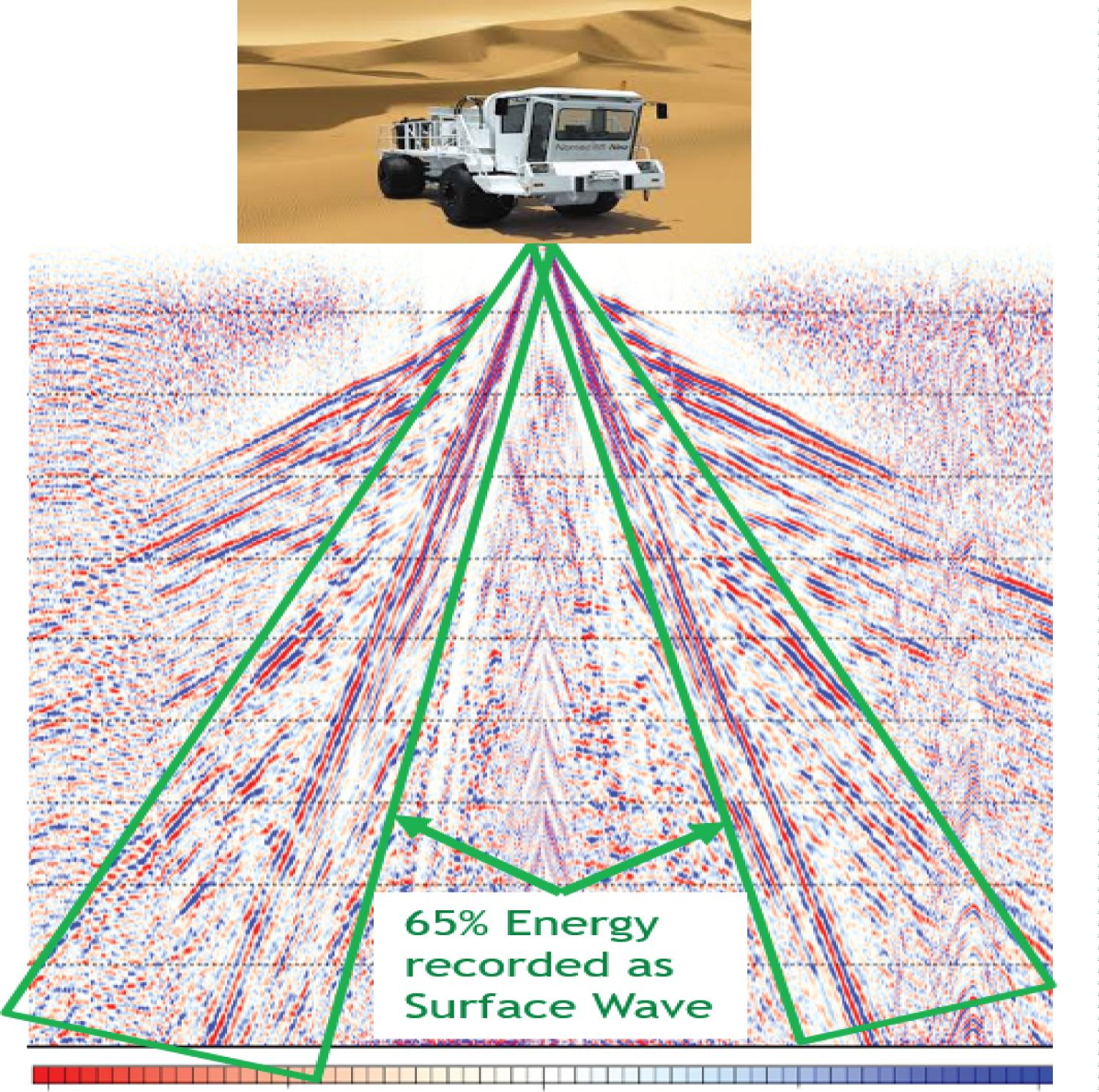

Figure 2: Near surface complex features in a...
Near surface complex features in a desert environment.
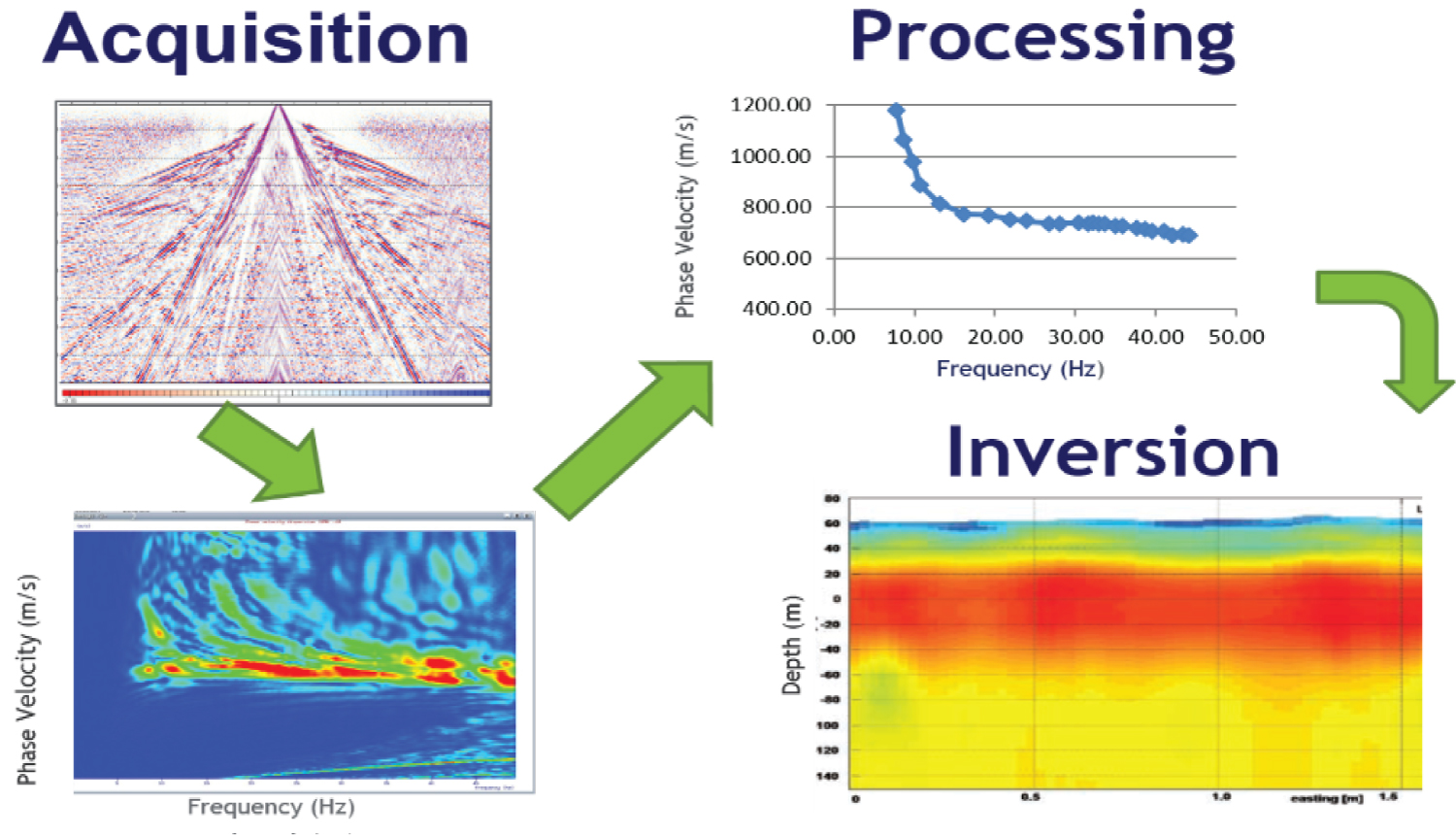
Figure 3: Schematic of multichannel analysis...
Schematic of multichannel analysis of surface waves processing.

Figure 4: Comparison of shear wave velocity....
Comparison of shear wave velocity model (Vs) outputs from the SWAMI (Vs swami), GA model (Vs GA & Vs GA Fundamental mode), Vs Actual is the actual or required shear wave velocity.
Figure 5: A typical shot gather (record line) for...
A typical shot gather (record line) for single sensor data.
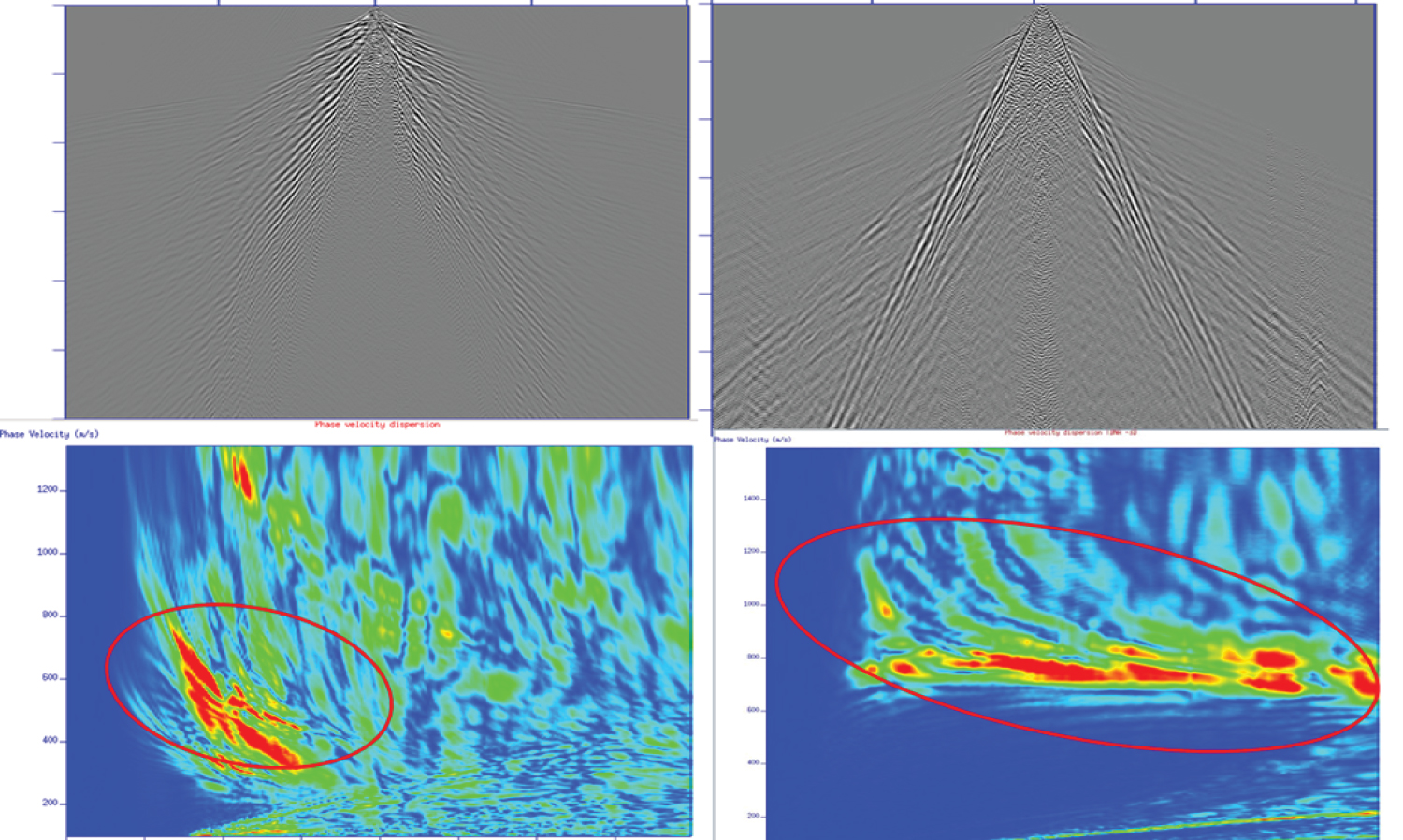
Figure 6: Comparison of shot gather (top)....
Comparison of shot gather (top) and dispersion curve (bottom) acquired using array geophone (a) and single sensor phone (b).
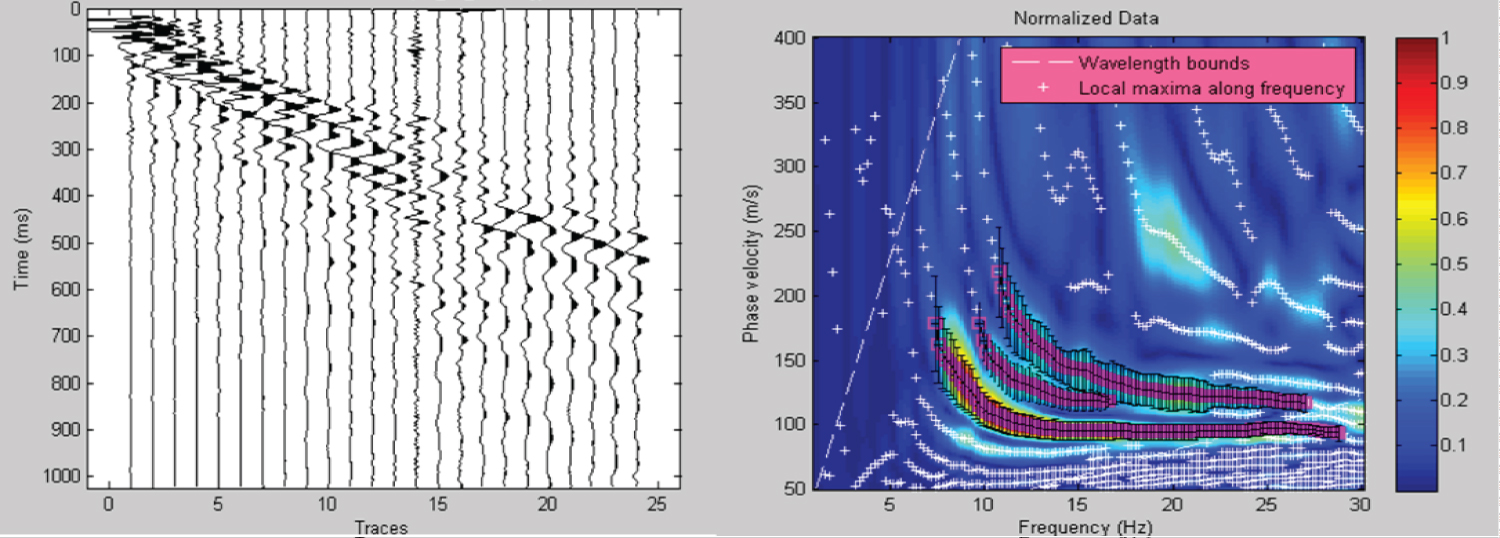
Figure 7: Synthetic shot gather (left) and...
Synthetic shot gather (left) and computed dispersion curve (right) showing three modes of surface wave modes.
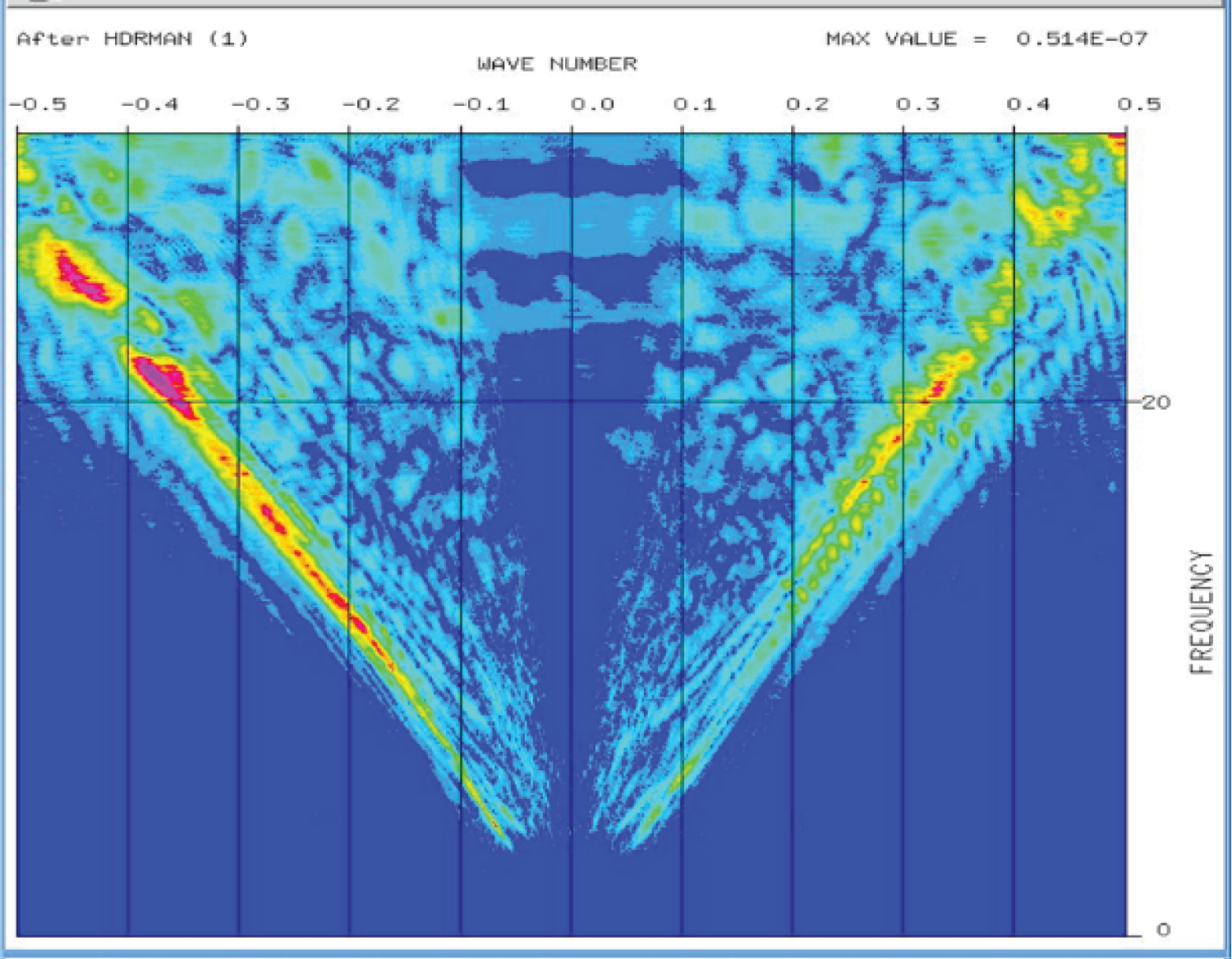
Figure 8: F-K spectrum computed for the....
F-K spectrum computed for the shot gather shown in Figure 7.
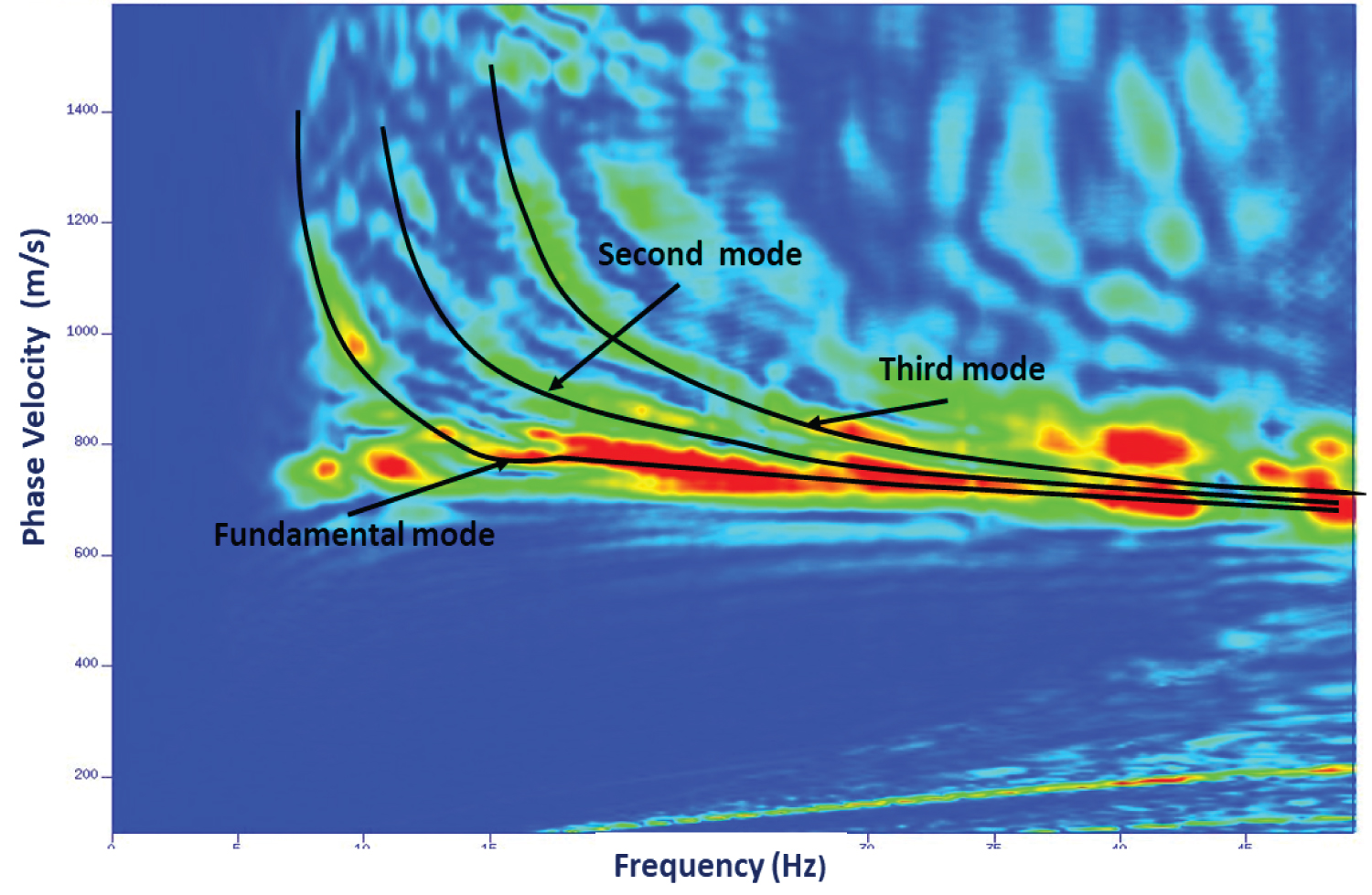
Figure 9: Multimodal dispersion curves...
Multimodal dispersion curves (Fundamental, 2nd and 3rd modes) generated from the shot gather shown in Figure 7.
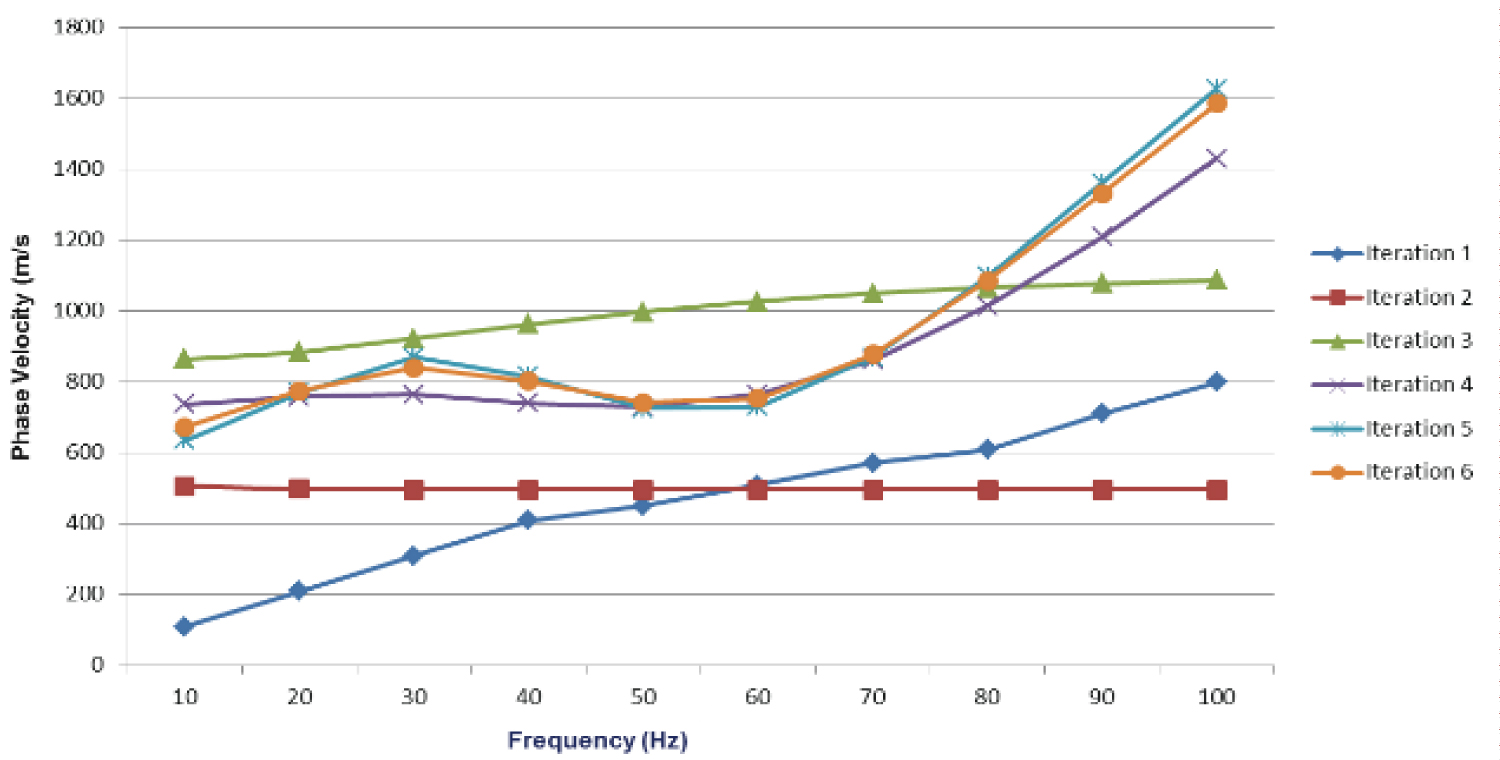
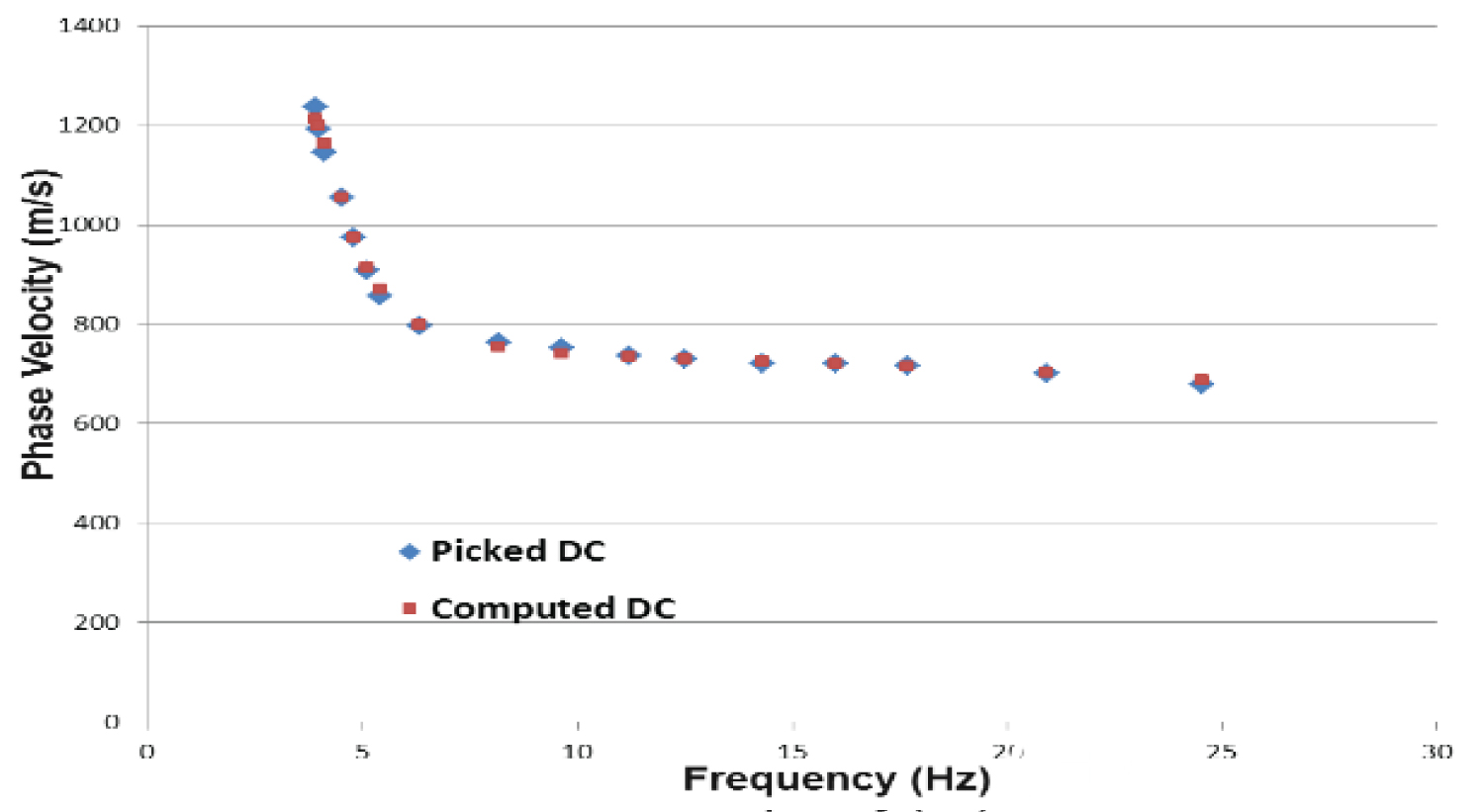
Figure 11: Validation of the surface wave...
Validation of the surface wave inversion showing a very good match between the picked and computed dispersion curves. a) Offset -300 to 0 m; b) Offset 0 to 300 m; c) Offset -300 to 300 m.
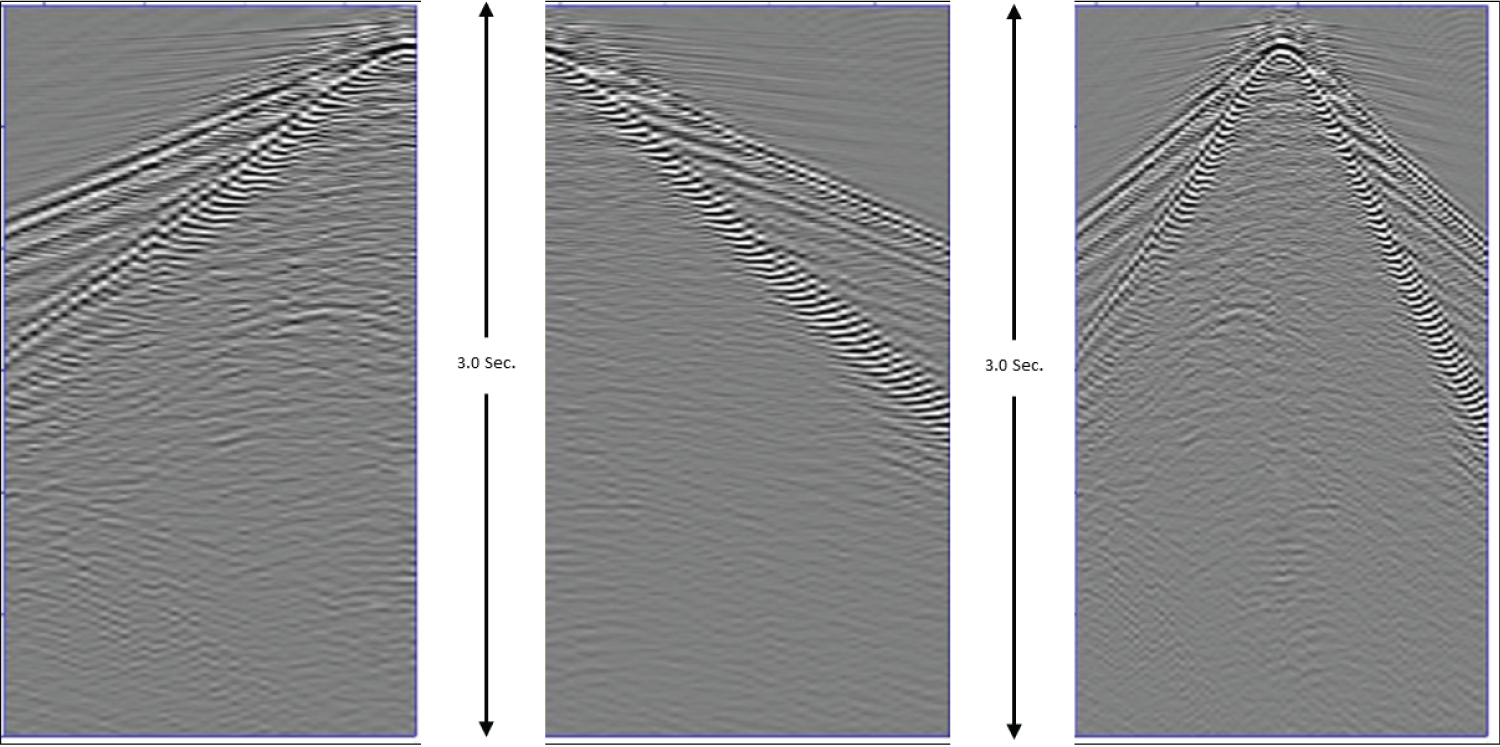
Figure 12: Common receiver gathers...
Common receiver gathers acquired for buried geophones with offsets -300 m. to 0 (left), 0 to 300 m. (center) and full offset, -300 to 300 m. (right).
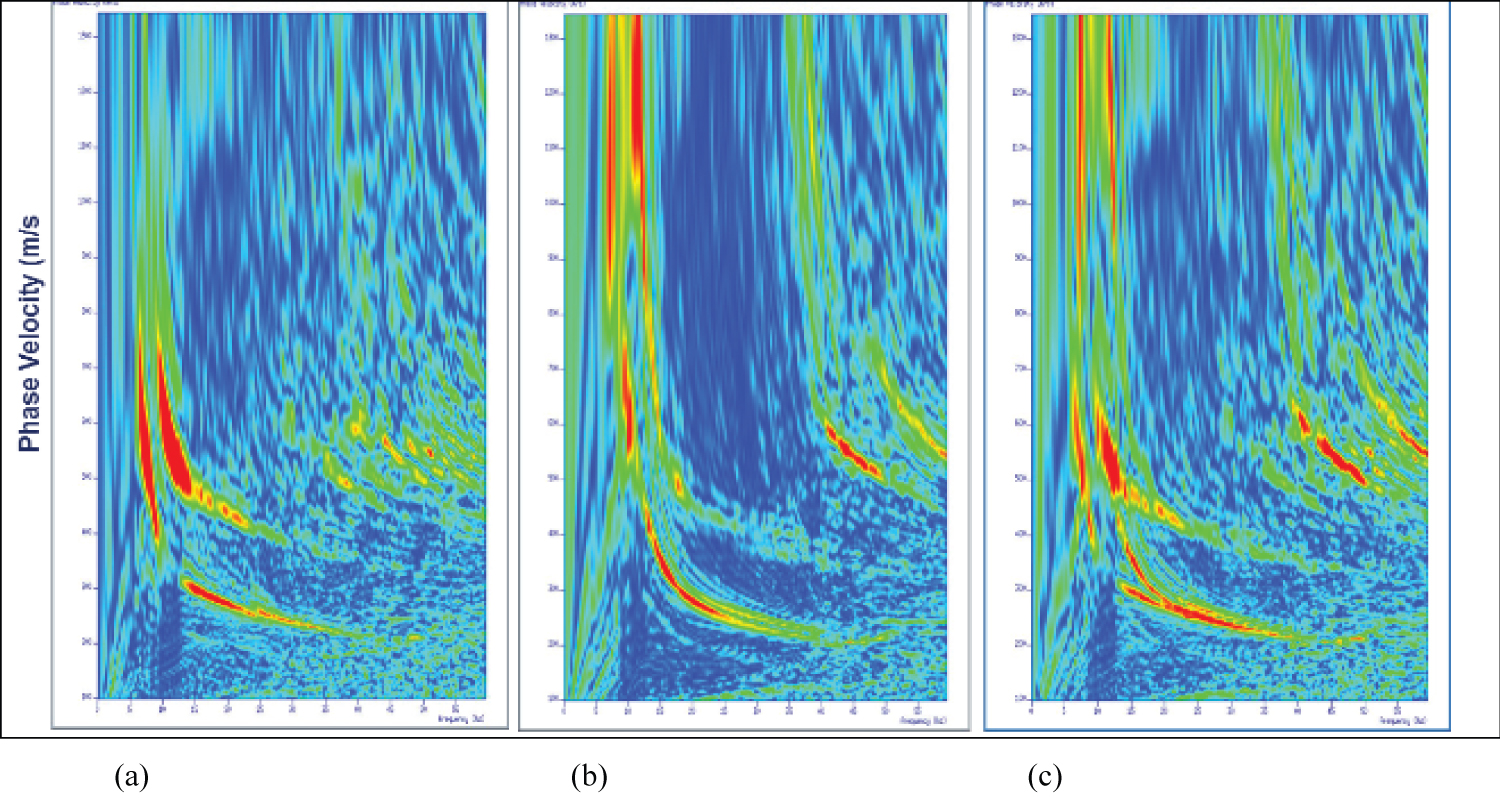
Figure 13: Dispersion curves computed from...
Dispersion curves computed from the common receiver gathers shown in Figure 12 (a) Offset -300 to 0 m; (b) Offset 0 to 300 m; (c) Offset -300 to 300 m.
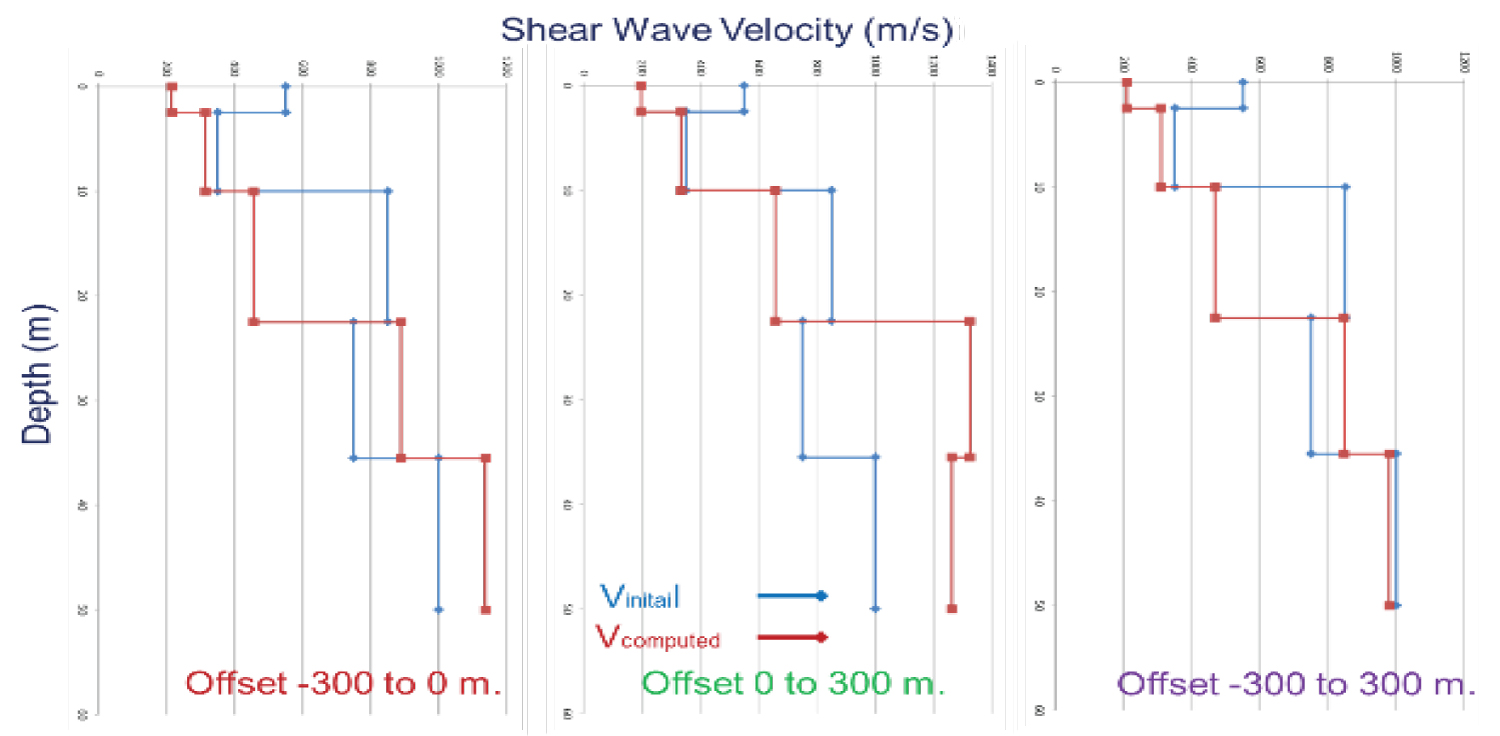
Figure 14: Model shear wave velocities for the...
Model shear wave velocities for the three offset ranges shown in Figure 13.
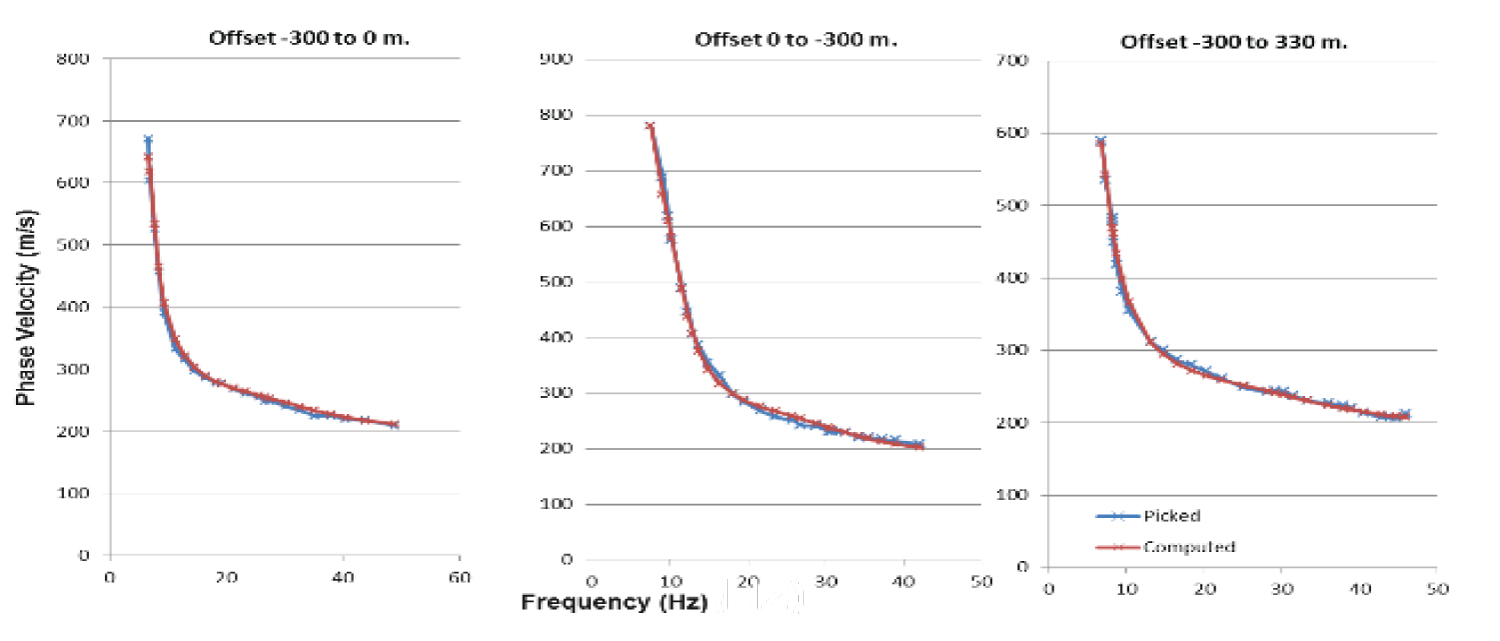
Figure 15: Validation of the surface wave...
Validation of the surface wave inversion showing a very good match between the picked and computed dispersion curves for each offset ranges shown in Figure 12.
Tables
Table 1: Initial Model parameter for cat 1, with no velocity inversion present in the layers.
Table 2: Initial Model parameter for case 2, with velocity inversion present in the layers.
Table 3: Comparison of shear wave velocities computed from (SWAMI & GA) for case 1, with no velocity inversion present in the layers.
Table 4: Initial model parameters for the SWAMI inversion.
Table 5: Calculated shear wave velocity from the SWAMI inversion scheme for each layer.
Table 6: Initial model parameters for the surface wave inversion.
References
- Strobbia C, Vermeer P, Laake A, Glushchenko A, Re S (2010) Surface waves processing, inversion and removal: First Break 28: 85-91.
- Pan Y, Gao L, Bohlen T (2019) High-resolution characterization of near surface structures by surface-wave inversions: From dispersion curve to full waveform. Wave Phenomena analysis numerics, KIT, 2019/3.
- Socco LV, Strobbia C (2004) Surface wave methods for near-surface characterization: A tutorial. Near Surface Geophysics 2: 165-185.
- Rached G, Al-Fares A (2006) Single-sensor 3D land seismic acquisition in Kuwait.SEG/New Orleans 2006 Annual Meeting, 61-64.
- Pezeshk S, Zarrabi M (2005) A new inversion procedure for spectral analysis of surface waves using a genetic algorithm. Bulletin of the Seismological Society of America 95: 1801-1808.
- Lai CG, Foti S, Rix GJ (2005) Propagation of data uncertainty in surface wave inversion. Journal of Environmental and Engineering Geophysics 10: 219-228.
Author Details
Ferhan Y Ahmed*, Constantinos Tsingas and Mohammed S Almubarak
EXPEC Advanced Research Center, Saudi Aramco, Dhahran, Saudi Arabia
Corresponding author
Ferhan Y Ahmed, EXPEC Advanced Research Center, Saudi Aramco, Dhahran, Saudi Arabia
Accepted: September 06, 2021 | Published Online: September 08, 2021
Citation: Ahmed FY, Tsingas C, Almubarak MS (2021) Near Surface Characterization by Seismic Surface Wave Inversion. Int J Signal Process Anal 6:008
Copyright: © 2021 Ahmed FY, et al. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Abstract
Surface waves are usually treated as unwanted coherent noise and steps are taken to remove them using geophone receiver arrays during seismic survey acquisition. During early data processing, attempts are made to further remove the ground roll. Recently, there has been a growing interest in using surface waves for estimating the near surface velocity model. Surface waves propagate in the shallow subsurface and can be used to derive shear wave velocities of the near surface. For seismic exploration in a desert environment, this is critical since the near surface geology is very complex. Surface wave analysis requires three steps: 1) Acquisition of data that is un-aliased and with sufficient low frequency content, 2) Processing to generate dispersion curves and 3) Inversion of the dispersion curves. In our study, we have successfully used surface waves extracted from a 3D seismic dataset, acquired using single sensor geophones as well as buried geophones. The use of single sensor geophones, along with dense surface coverage, allowed us to acquire data that is un-aliased as well as having good low frequency content. The datasets were used to derive shear wave velocities characterizing the near surface. Using synthetic data, two inversion techniques, genetic and model-based algorithms were evaluated. We found out that the model-based algorithm is better suited for our study area where the near surface is complex and characterized by the presence of velocity inversions.
Introduction
In land seismic surveys, surfaces waves (Rayleigh waves or ground roll) account for over 65% of the total energy recorded (Figure 1) and are the dominant events in any seismic records. Surface waves are usually treated as unwanted coherent noise and steps are taken to remove them using geophone receiver arrays during seismic survey acquisition. Also, during early data processing, attempts are made to further remove the ground roll.
Recently, there has been a growing interest in the industry in using surface waves to estimate the near surface velocity model. With closely spaced point-receivers, the wavefield is better sampled in space and time so that surface waves can be analyzed and inverted to characterize the near surface [1]. This is important for seismic data acquired over land desert environment where the near surface geology is very complex. In a desert environment, as shown in Figure 2, the near surface is the main imaging challenge due to the presence of features such as wadis, sand dunes, karst, etc. Surface waves propagate in the shallow subsurface and thus provide important information on the elastic properties of the near surface. By extracting and inverting dispersion curves to obtain local 1D S-wave velocity profiles, multichannel analysis of surface waves (MASW) has been proven as an efficient way to analyze shallow-seismic surface waves [2].
In heterogeneous elastic media, surface waves are quite dispersive, i.e., each frequency component travels at a different phase velocity. Dispersion curves are computed from pre-stack seismic gathers by taking advantage of the dispersive properties of Rayleigh waves.
Surface wave inversion is normally performed by inverting the dispersion curve to derive shear wave velocity model for the near surface. The inversion generally suffers from non-uniqueness in the solution and low model parameter resolution [3].
In this paper, we are evaluating two of the widely used inversion algorithms, the genetic and model-based inversion algorithms using synthetic and field data. The field datasets used in the analysis was acquired using single sensor geophones in a desert environment. The presence of a low frequency component in the single sensor data along with denser coverage was critical for the inversion.
Methodology
The multichannel analysis of surface waves (MASW) in general requires three stages. The first stage is acquiring high dense data that is un-aliased and with sufficient low frequency content. This is achieved by deploying a seismic survey crew equipped with single source and single sensor scheme. The second stage is the processing stage, it involves the generation of dispersion curves as well as f-k spectrum sections. The last stage is the surface wave inversion scheme using input either from the dispersion curves or the f-K sections generated from the stage 2. The schematic that we employed for processing of the multichannel analysis of surface waves is shown in Figure 3.
Data Acquisition
In land seismic, surface wave inversion process requires properly acquired of seismic data which is not aliased. This is achieved by using point source and single sensor acquisition survey configuration. The use of single sensor seismic acquisition resolves the aliasing problems associated with inadequate special sampling [4]. Traditional seismic acquisition surveys utilizes array of geophones (normally having a length of about 50 m.) to suppress the ground roll energy or filter out the surface waves during the acquisition process. The usage of such geophone arrays significantly downgrades the quality of the seismic data due to the presence of intra-array perturbations and aliasing as the surface wavefield is not properly sampled. Moreover, the damage done by the geophone array or group forming is irreversible as critical wave field information is lost during the acquisition process. As depicted from Figure 3, schematic of multichannel analysis of surface waves processing, surface wave processing starts by generating either F-K spectrum section (Figure 4) or dispersion curve (Figure 5) from a shot gather. In our analysis, we prefer to use the dispersion curve, as it is more convenient to pick the surface wave events.
Figure 6 shows a comparison of shot gather acquired using conventional geophone array and single sensor geophone. In the case of the shot gather acquired using the array geophone Figure 6a, the shot records are aliased and the surface waves are not acquired properly as can be seen from the dispersion curve (DC) Figure 6a bottom circled in red. Thus, we were not able to pick form the DC as the energy is concentrated or converged in the narrow bandwidth as shown by the red circle Figure 6a bottom. However, in the case of data acquired by the single sensor, the surface waves are acquired un-aliased, better imaged Figure 6b and the corresponding DC is more defined and the events are conveniently pickable as the energy is defined in a broader bandwidth as shown by the red circle. Therefore, the single sensor data allow us to generate a pickable and interpretable surface wave event that we can easily pick and utilize them in the inversion schemes described below.
Inversion Schemes
There are a variety of surface wave inversion schemes or algorithms that have been used for characterizing the near surface velocity model. However, in our analysis we focused and evaluated two of the inversion algorithms namely, the Genetic Algorithm (GA) of Pezeshk and Zarrabi [5], and the model-based algorithms, Surface Wave Modal Inversion (SWAMI) of Lai, et al. [6]. We are not going to go into the details of the two algorithms, as the scope of this paper is to focus on the application of the methods rather than the description of the methods.
We started the evaluation of the two inversion schemes (SWAMI & GA) using a synthetic shot gather show in Figure 7 (left) along with the computed dispersion curve Figure 7 (right). In the evaluation, we used two cases of the initial velocity model to test the effectiveness of the inversion schemes. In the first case, we allowed the initial velocity to increase linearly i.e. velocity model with no inversion as the velocity increases with depth (Table 1). In the second case, we inserted low velocity model in the middle of the depth i.e. velocity mode with the presence of inversion along the depth (Table 2).
The tables below show the model parameters for testing the two algorithms using two cases with no velocity inversion (Table 1) and with velocity inversion (Table 2) a velocity inversion.
The input model parameters shown in the above tables were used to generate shear wave velocity models to characterize the near surface or generate near surface velocity model. In both modeling cases, we use the fundamental surface mode only.
Table 3 and Figure 4 summarize comparison of the model output results or the derived shear wave velocity models using the two inversion schemes (SWAMI & GA). In the case of the synthetic data, as the actual shear wave velocity (vs actual) was used in generating the synthetic shot gather shown in Figure 7 (left). Therefore, the most accurate inversion scheme should yield shear wave velocity that better matches the actual values (Vs actual). Table 3 show comparison of output results for the case 1 i.e. where there is no velocity inversion in the model. As can be seen both the SWAMI and the GA gave comparable results. On the other hand, Figure 4 summarizes the other case, i.e. with the presence of velocity inversion in the model. The SWAMI algorithm gave velocity output that matched better the actual velocities in the shallow as well as deeper sections. In the case of the GA the results using the fundamental outputs are far apart from the gourd truth and the errors in the derived shear wave velocities were much higher. We had to use the higher modes (vs GA) to bring it closer to the truth. However, in the case of the SWAMI the fundamental outputs are close enough to our desired output and there was no need to go to a higher mode. Using higher modes will improve the inversion result, but the cost of identifying and picking the higher modes is very challenging on field data. Therefore, we have employed the SWAMI inversion scheme for our analyses in all the field data examples discussed below.
Field Data Example I (Single Sensor)
As mentioned before, surface waves are traditionally filtered out and are also aliased in the conventional array acquisitions. It is basically very challenging to do surface wave inversion analysis using data acquired by conventional array geophones, as the events are aliased and not clearly defined in the dispersion curves to allow us to pick the events, see Figure 6a. However, in a seismic survey acquired using the point source-receiver acquisition, surface waves can be acquired un-aliased and can be conveniently inverted to characterize the near surface. As discussed above, we have employed the SWAMI inversion algorithm in our single sensor dataset. A shot gather for one such record line is shown in Figure 5. The F-K spectrum and the corresponding computed dispersion curve are shown in Figure 8 and Figure 9. The dispersion curve (Figure 9) clearly depicts the fundamental surface wave as well as the two higher modes (multimode) as the data has been acquired using single sensor geophone with dense acquisition.
The multimodal events are clearly separated and distinct, making the picking of events very convenient, particularly at the lower frequencies, which are critical for the inversion to work effectively. This level of resolution is not possible with data from conventional array acquisition as the events are either aliased or strongly attenuated.
The initial model parameters used for the inversion are shown in Table 4. The layer number and thicknesses are assumed fixed, with Vp/Vs ratio ranging from 1.8 to 2.0 and density from 1.6 to 1.8 g/cc for the layers. The inversion scheme estimates only the shear wave velocity for each layer, while all other input parameters are kept constant or fixed.
The SWAMI inversion scheme is very robust and converges quickly, after six iterations as shown in Figure 10. The inversion validation is shown in Figure 11 with very good match between the picked events and the computed dispersion curves. The final computed shear wave velocities are shown in Table 5. As expected, even though no velocity inversion were present in the initial parameter, there was inversion or low velocity structure in the modelled shear wave velocities between depths of 50 to 60 meters with the corresponding velocities of 742 and 753 m/s. This is very interesting and critical for our interpretation as these values are indicative of the presence of some kind of anomaly.
Field Data Example II (Buried Sensor)
We have also applied the SWAMI surface wave inversion scheme to a data acquired from single source geophones buried several meters below the surface. Figure 12 show three receivers gathers form buried single sensor geophone data for three offset ranges. We have observed considerable lateral heterogeneities in the three receiver gathers, due to the presence of complex near surface geology. Therefore, the analyses was performed separately in the predefined windowed offset ranges (-300 to 0 m, 0 to 300, -300 to 300 m.) in order to compare the output results. Source locations to the right of the receiver sensor show much less ground roll generated than those to the left indicating stronger lateral heterogeneity. The computed dispersion curves for the corresponding offset ranges are shown in Figure 13.
The initial model parameters used are shown in Table 6. The inversion results are shown in Figure 14 for each offset range. The output results show that there are considerable differences in the computed shear wave velocities in each offset range, possibly as a result of complex near surface geology. The output model results for the offset range -300 to 0 m. and -300 to 300 m. look quite similar and even though we try to impose velocity inversion on the initial model parameter. There was no indication of velocity inversion from the computed shear wave velocities. On the other hand, the computed shear wave velocities from the offset 0 to 300 m. are quite different from the other two offset ranges shown in Figure 13. This clearly demonstrates the presence of lateral heterogeneity as well as the presence of an anomaly or inversion roughly below the 39 m depth interval or the fourth layer. The inversion validation results are shown in Figure 15. As can be seen from Figure 15, there are excellent matches between the computed and picked dispersion curves.
Conclusions
We have successfully used surface waves acquired from land surface single sensor geophones as well as buried geophones to characterize the near surface shear wave velocity model. The use of single sensor geophones, along with dense surface coverage, allowed us to acquire surface data, which are un-aliased as well as low frequency content. Using synthetic data, we evaluated two inversion techniques, namely genetic algorithms and model-based (SWAMI) method, we demonstrated the SWAMI scheme produced better results in the presence of velocity inversions. This is critical as in the desert environment the near surface is complex and the velocity variations are quite significant. Single sensor shot or receiver gathers were used to generate dispersion curves with sufficient coherence for picking. The dispersion curves were subsequently inverted using the SWAMI inversion scheme to derive shear wave velocities characterizing the complex near surface.